




Moteur sous-marin étanche 24 V ~ 36 V, poussée de 7 kg à 9 kg
Description
Le moteur sous-marin sans balais SW4025 fonctionne sous une tension de 24 à 36 V CC et est spécialement conçu pour les drones et robots sous-marins. Ce modèle est vendu sans hélice ; l’utilisateur peut donc concevoir sa propre hélice et la fixer à l’aide de vis.
Il s'agit d'un moteur sans balais ordinaire, il peut être piloté par n'importe quel contrôleur ESC de drone ordinaire ou par un contrôleur de moteur sans balais ordinaire.
Forme élégante, longue durée de vie, technologie silencieuse, taux d'économie d'énergie élevé, couple élevé et haute précision.
Il est largement utilisé dans les équipements électroniques de précision, les équipements d'automatisation, les équipements hydrauliques et sous-marins, les drones et les robots intelligents.
Avant de passer commande, veuillez vous assurer que vous êtes capable de concevoir l'hélice.
Paramètres
| Type de moteur | moteur sans balais sous-marin |
| Poids | 310 g |
| poussée sous-marine | 7 à 9 kg |
| Tension nominale | 24~36V |
| valeur KV | 200~300 |
| vitesse de déchargement | 7000 |
| Puissance nominale | 450~800W |
| Courant en charge | 15~23A |
| Couple nominal | 0,9 N*m |
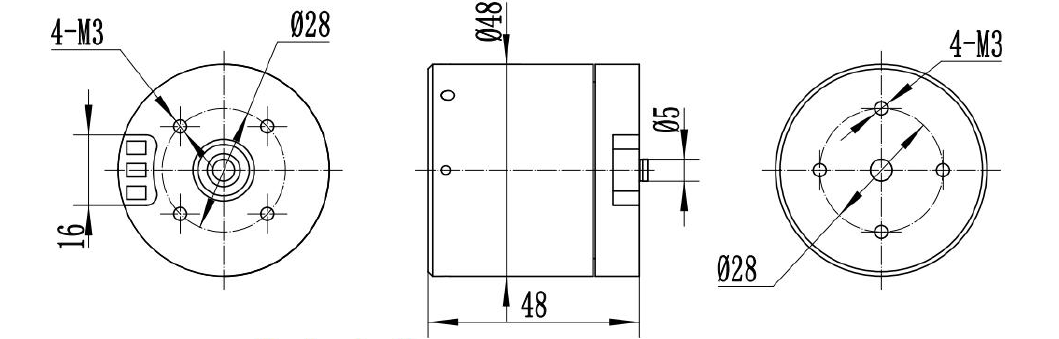
Schéma technique : Trous de vis sur le dessus servant à fixer l’hélice
À propos des moteurs sous-marins
Étant donné que le moteur sans balais utilise une commutation électronique, son fonctionnement doit s'adapter à l'alimentation CC du moteur, au pilote (ESC) et au signal de contrôle de vitesse.
Prenons l'exemple d'un contrôleur de vitesse électronique (ESC) standard. Commencez par débrancher l'alimentation, puis connectez les câbles du moteur et le signal de vitesse. Placez la manette des gaz à fond (cycle de service complet), puis rebranchez l'alimentation. Vous entendrez deux « drop ». Ramenez rapidement la manette des gaz en position basse, puis vous entendrez le bruit normal du démarrage du moteur : « drop ---drop ». L'étalonnage de la course de la manette des gaz est terminé ; vous pouvez démarrer le moteur normalement. (Le mode de fonctionnement des ESC peut varier selon les fabricants. Veuillez consulter le manuel du modèle d'ESC correspondant ou contacter le fabricant pour plus de détails.)
Les clients peuvent utiliser un contrôleur de vitesse électronique (ESC) de drone standard pour piloter ce moteur.
Nous produisons uniquement des moteurs et nous ne fournissons pas de contrôleurs de vitesse électroniques (ESC).
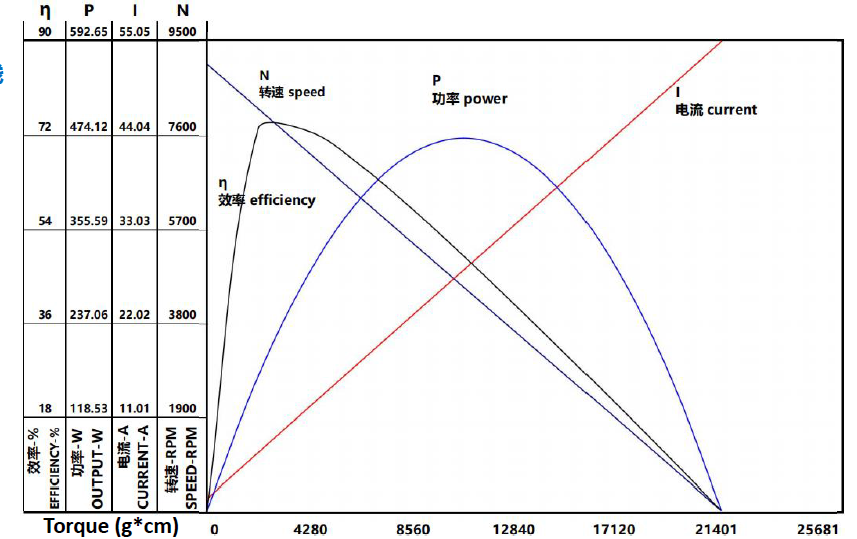
Courbe de performance du moteur SW2216 (16 V, 550 kV)
avantages du moteur sous-marin
1. Étanche à l'eau et à l'humidité pour éviter les courts-circuits des composants électriques à l'intérieur de la chambre.
2. Blocage efficace de la poussière et des particules pour éviter l'usure des roulements.
3. Gardez la cavité sèche pour éviter que le moteur et le bloc moteur ne se corrodent et ne s'oxydent, ce qui entraînerait un mauvais contact ou une fuite.
Applications
●Instrument électronique de précision
●Équipements d'automatisation
●Équipement sous-marin
●Modèle réduit d'avion drone
●Robot intelligent
Axe de sortie
1. Méthode de câblage
Tout d'abord, le moteur, l'alimentation et le contrôleur de vitesse électronique (ESC) doivent être sélectionnés avec précision en fonction de la charge et des conditions d'utilisation. Une tension d'alimentation trop élevée risque d'endommager le moteur et l'ESC, tandis qu'une puissance de décharge insuffisante empêchera le moteur d'atteindre sa puissance nominale et affectera son fonctionnement. Le choix de l'ESC doit également correspondre à la tension nominale du moteur. Les vis de fixation du moteur ne doivent pas être trop longues afin de ne pas endommager la bobine. Avant le câblage, par mesure de sécurité, retirez la charge du moteur. Connectez d'abord les trois fils de l'ESC au moteur (deux de ces fils peuvent être inversés pour changer le sens de rotation du moteur), puis connectez le câble de signal de l'ESC en respectant l'ordre de connexion et en évitant toute inversion. Enfin, connectez l'alimentation CC en respectant la polarité. La plupart des ESC du marché sont protégés contre l'inversion de polarité ; un ESC non protégé risque de griller s'il est branché avec une alimentation de polarité différente.
2. Calibrage de la course de l'accélérateur.
Lors de la première utilisation d'un ESC, ou en cas de changement de la source du signal PWM, ou encore d'utilisation prolongée d'un signal d'accélérateur non calibré, il est nécessaire de calibrer la course de l'accélérateur.
Informations sur les délais de livraison et l'emballage
Délai de livraison des échantillons :
Moteurs standard en stock : livraison sous 3 jours
Moteurs standard non disponibles en stock : livraison sous 15 jours.
Produits personnalisés : environ 25 à 30 jours (selon la complexité de la personnalisation)
Délai de fabrication d'un nouveau moule : généralement environ 45 jours
Délai de production en série : variable selon la quantité commandée
Conditionnement
Les échantillons sont emballés dans de la mousse de polystyrène et placés dans une boîte en carton, puis expédiés par express.
Production en série : les moteurs sont emballés dans des cartons ondulés recouverts d’un film transparent. (Expédition par avion)
En cas d'expédition par voie maritime, le produit sera emballé sur des palettes.

Emballage, méthode et délai de livraison
| DHL | 3 à 5 jours ouvrables |
| UPS | 5 à 7 jours ouvrables |
| TNT | 5 à 7 jours ouvrables |
| FedEx | 7 à 9 jours ouvrables |
| Services médicaux d'urgence | 12 à 15 jours ouvrables |
| Poste chinoise | Cela dépend du navire et du pays de destination. |
| Mer | Cela dépend du navire et du pays de destination. |

mode de paiement
| mode de paiement | Carte maîtresse | Visa | Chèque électronique | PAYER PLUS TARD | T/T | PayPal |
| délai de livraison des échantillons | environ 15 jours | |||||
| Délai de livraison pour les commandes en gros | 25 à 30 jours | |||||
| garantie de qualité des produits | 12 mois | |||||
| Conditionnement | Emballage individuel en carton, 500 pièces par boîte. | |||||
Envoyez-nous votre message :
Catégories de produits
-

micro-moteur pas à pas 3,3 V 6 mm de haute qualité et à faible bruit...
-

Vis M3 à 2 phases, mini-engrenage pas à pas de 10 mm...
-

Moteur à courant continu N20 à balais avec réducteur 1024, puissance…
-

Moteur pas à pas haute précision 42 mm NEMA 17 hybride...
-

Moteur pas à pas à aimant permanent de 50 mm de diamètre à faible bruit...
-

Moteur pas à pas hybride NEMA 23 à couple élevé 57 mm m...